
The rover is equipped with an articulated robotic arm capable of handling elements around it. We have been inspired by some pictures on Internet and this documentary:
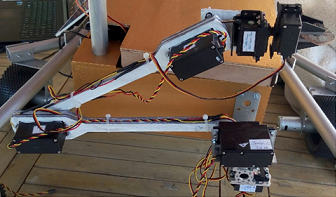
The arm is composed of six servo motors MG955 to control active elements. 2 are for the shoulder, 1 for the elbow, 1 for the wrist and 2 for the clamp's motion. All the servos are labelled with a unique number to help us understand and fix more rapidly and if needed. We can add a servo easily (raising the constant NB_SERVO) thanks to a switch structure.
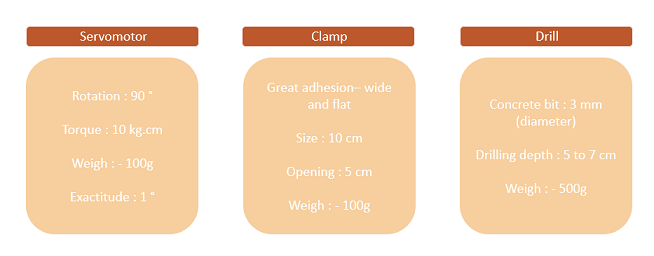


A clamp F17310 is attached to the extremity of the arm but it's not a component of Curiosity. Usually, they
are equipped with spade or broom to get back rock dust. So, why this choice? It's simple, because we can
control its motion (high/low by analogy with our wrist) catching little rocks or getting some samples. It's
composed of 2 servo motors: one for the rotation clamp and the other to open and close the clamp.
Advantage: wide aperture (5cm), flat, great adhesion and grasping, light, strong (hard plastic)
To hold these servos the arm structure has been designed in SOFAB with the objectives of sturdiness and lightness. Jean DEMARTINI (member of SOFAB) has given us some rules to use the software LibreCad which allowed us to cut pieces thanks to the laser cutting. And then we have used these pieces (made of wood) to strengthen the link between servos.

If we strengthen the servos thanks to a gears system, we could add an electrical circular drill. Indeed, we
have already studied this option. Its weight and size are important characteristics; the drill must dig deep
(5 to 7cm) not to analyse superficial layers but deeper layers and the drill diameter must be a bit wide to
prevent damage. We could also implement an obstacle detection with ultrasound detectors on the arm and
decide to stop the movement if it's necessary or implement a joystick control of the robotic arm.
Code: Arduino Servos